Managing Electric Vehicle fleets at scale requires robust observability — but developing against live vehicle APIs introduces friction and fragility. In this talk, we demonstrate how to build a self-contained Rivian API Simulator in Python to accelerate development and validate observability pipelines before hitting production.
What You'll Learn
- The Power of Simulators: Decoupling from external dependencies like the Rivian API for rapid development
- Python Architecture: Dual-threaded simulation using Flask and SQLite
- Simulation vs. Mocking: Why behavior-based simulators catch integration bugs better than standard mocks
- OpenTelemetry for EV Fleets: Leveraging traces, metrics, and logs for fleet management
- Scaling with Docker & Kubernetes: Deployment best practices from laptop to production
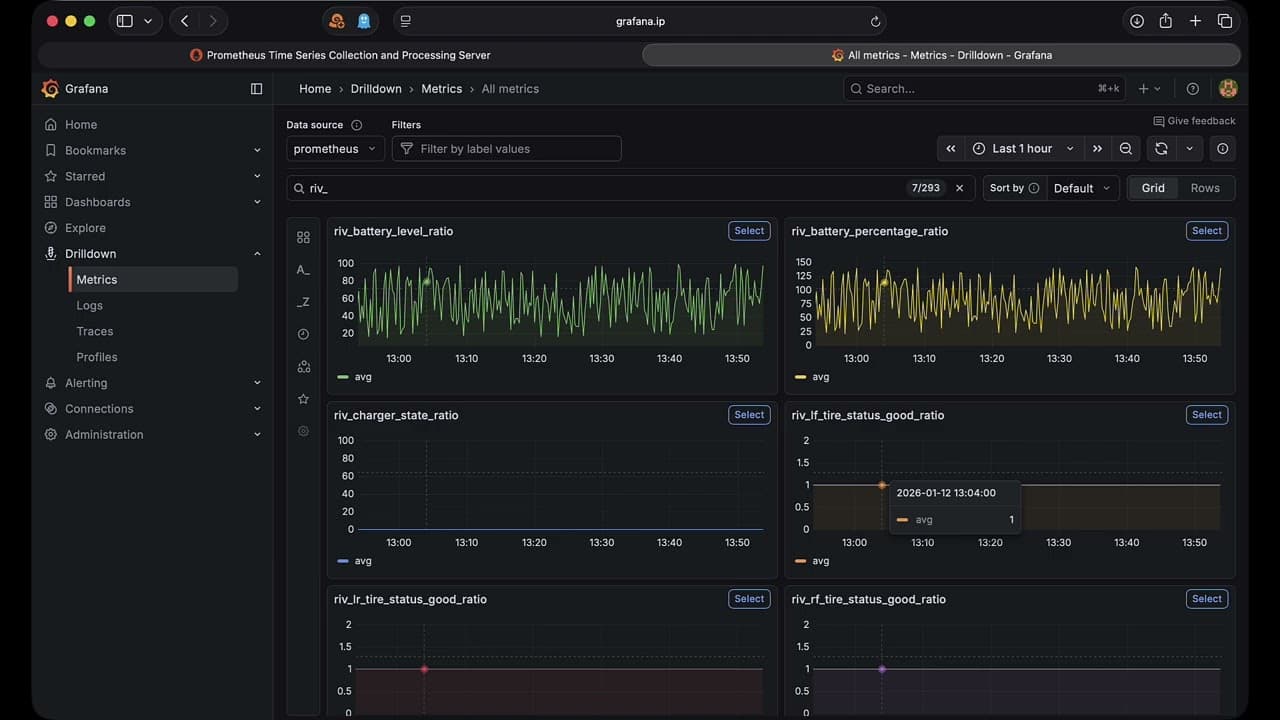
- Real-World Scenarios: Testing battery alerts, geofence violations, and high-frequency GPS data
Video Chapters
- 00:00 – Introduction & Meet the Team
- 03:02 – Overview of Python in the Project
- 06:42 – The IP Rivian API Simulator Architecture
- 11:05 – Deep Dive: Python Simulation Code
- 15:18 – GraphQL API Endpoints & Mock Data
- 18:45 – Benefits of Simulating a Target API
- 21:05 – Simulation Testing in Practice
- 24:45 – The EV Fleet Monitoring Challenge
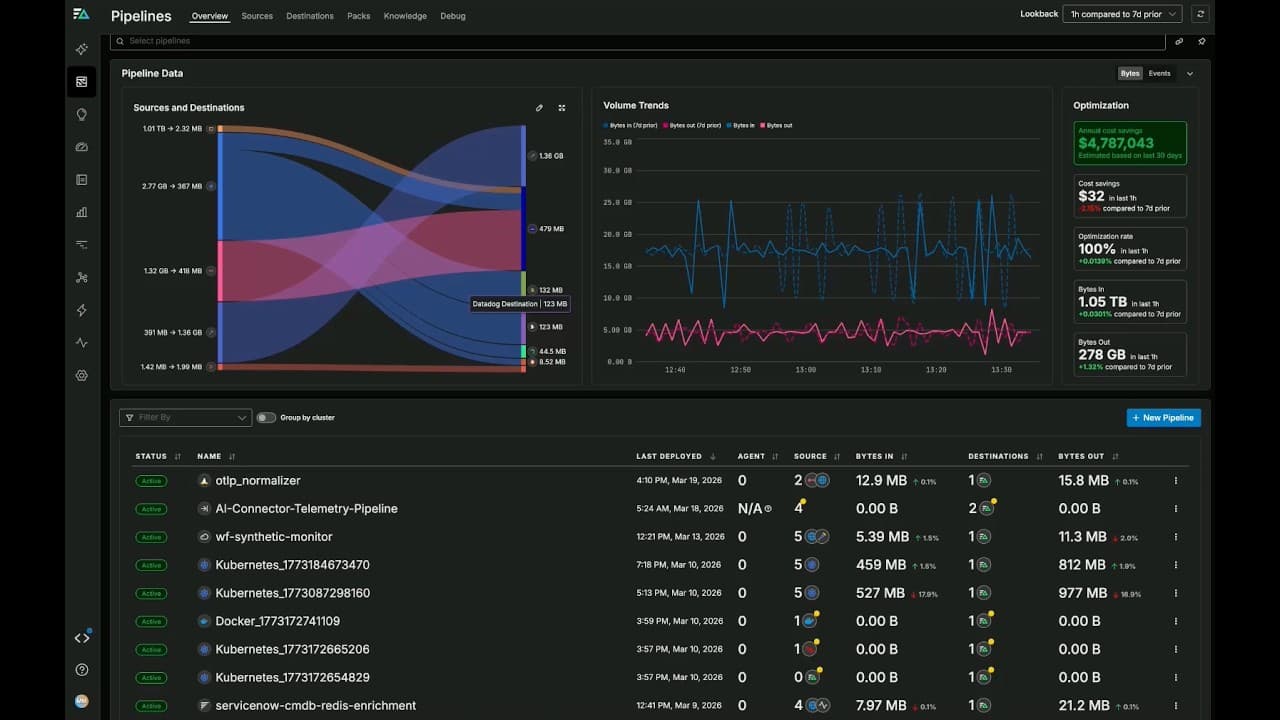
- 27:26 – OpenTelemetry for EV Fleet Monitoring
- 32:31 – Testing the OTel Pipeline with Simulators
- 34:17 – Engineering Review & Design Tradeoffs
- 39:43 – Summary & Key Takeaways
- 41:24 – Q&A & Contact Information